Etape 4 - Programme de la carte micro:bit

Source : microbit.org
Le programme de la carte micro:bit gère tous les fonctionnements décrits dans le diagramme d’états suivant :
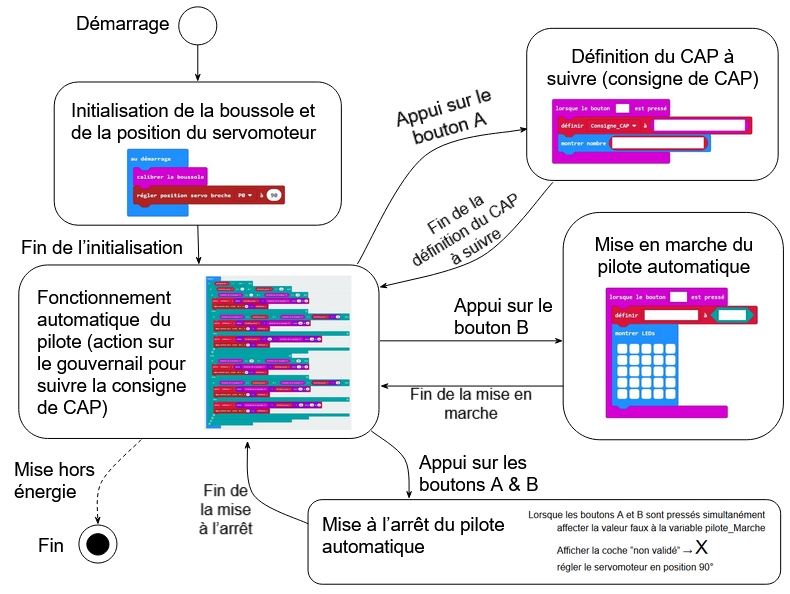
Le programme de la carte micro:bit est donné dans T/travail/technologiePC/4ème/Activité 6-2. Cependant, il est incomplet, seul le programme bloc de l’algorithme de la question 3 étape 3 (fonctionnement automatique du pilote : action sur le gouvernail pour suivre la consigne de CAP) existe dans le fichier. Il manque donc les 4 parties de programmes blocs suivantes (voir diagramme d’états précédent) :
- initialisation de la boussole et de la position du servomoteur,
- définition du CAP à suivre (consigne de CAP),
- mise en marche du pilote automatique,
- mise à l’arrêt du pilote automatique.
En îlot
Les questions ci-dessous doivent obligatoirement être réalisées sur les deux ordinateurs de l'îlot.
Ne pas utiliser les blocs de la version V2 de la carte micro:bit
Programme "initialisation de la boussole et de la position du servomoteur"
|
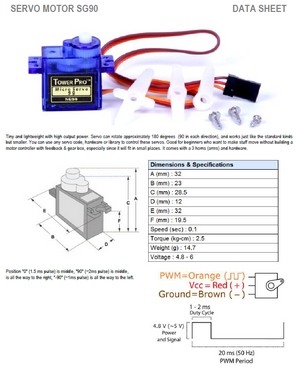
1- A partir de l'extrait de la documentation sur la carte micro:bit donné en ressources en bas de page |
 |
|
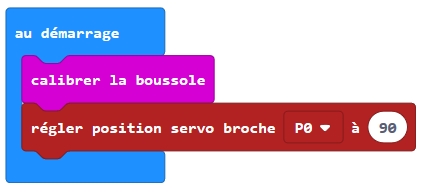
2- A la lecture du programme bloc donné ci-dessous, indiquer dans quelle position se trouvera le palonnier du servomoteur après le démarrage de la carte Micro:bit. Un rappel sur le servomoteur est donné en ressources en bas de page
|
 |
|
3- Ouvrir le service en ligne makecode.microbit.org (coin élève du site technopc 4- Ajouter le programme d'initialisation de la boussole et de la position du servomoteur ci-dessus au programme de la carte micro:bit. Attention de ne pas modifier le programme bloc déjà présent. 5- Tester le fonctionnement des programmes bloc sur le simulateur du service en ligne makecode.microbit.org. 6- Télécharger le programme dans U:(perso) en guise de sauvegarde. |
Programme "définition du CAP à suivre (consigne de CAP)"
|
1- Visionner la vidéo “prise de consigne CAP à suivre” donnée en ressources en bas de page |
||||
|
2- Compléter, à partir de la description du fonctionnement donnée ci-dessous et des propositions de réponses, le programme bloc permettant d’obtenir un fonctionnement similaire à la vidéo “prise de consigne CAP à suivre”.
|
 |
|||
|
3- Ajouter le programme bloc de la question précédente au programme microbit-pilote_automatique de la carte micro:bit à partir service en ligne makecode.microbit.org (coin élève du site technopc 4- Tester le fonctionnement du programme bloc sur le simulateur du service en ligne makecode.microbit.org. 6- Télécharger le programme dans U:(perso) en guise de sauvegarde. |
Programme "mise en marche du pilote automatique"
|
1- Compléter, à partir de l’algorithme suivant, le programme bloc qui gère la mise en marche du pilote automatique.
|
 |
|
|
2- Ajouter le programme blocs de la question précédente au programme microbit-pilote_automatique de la carte micro:bit à partir service en ligne makecode.microbit.org (coin élève du site technopc 3- Tester le fonctionnement du programme blocs sur le simulateur du service en ligne makecode.microbit.org. 4- Télécharger le programme dans U:(perso) en guise de sauvegarde. |
Programme "mise à l'arrêt du pilote automatique"
|
1- Ajouter, à partir de l’algorithme ci-dessous, le programme bloc qui gère l’arrêt du pilote automatique au programme de la carte micro:bit à partir du service en ligne makecode.microbit.org (coin élève du site technopc
2- Tester le fonctionnement du programme blocs sur le simulateur du service en ligne makecode.microbit.org. |
||
|
3- Insérer une image du programme bloc dans votre document élève. 4- Télécharger le programme dans U:(perso) en guise de sauvegarde. |
 |
 |
Bonus rapidité Le Rapporteur de votre îlot doit prévenir le professeur que vous avez terminé l'étape 4. |
Ressources
| Documentation sur la carte micro:bit (extrait) |
Vidéo "prise de consigne CAP à suivre" |
|
Source : microbit.org |
Au collège, visionner la vidéo depuis T/travail/TechnologiePC/4eme/Activité 6-2/prise de consigne CAP a suivre.mp4
|
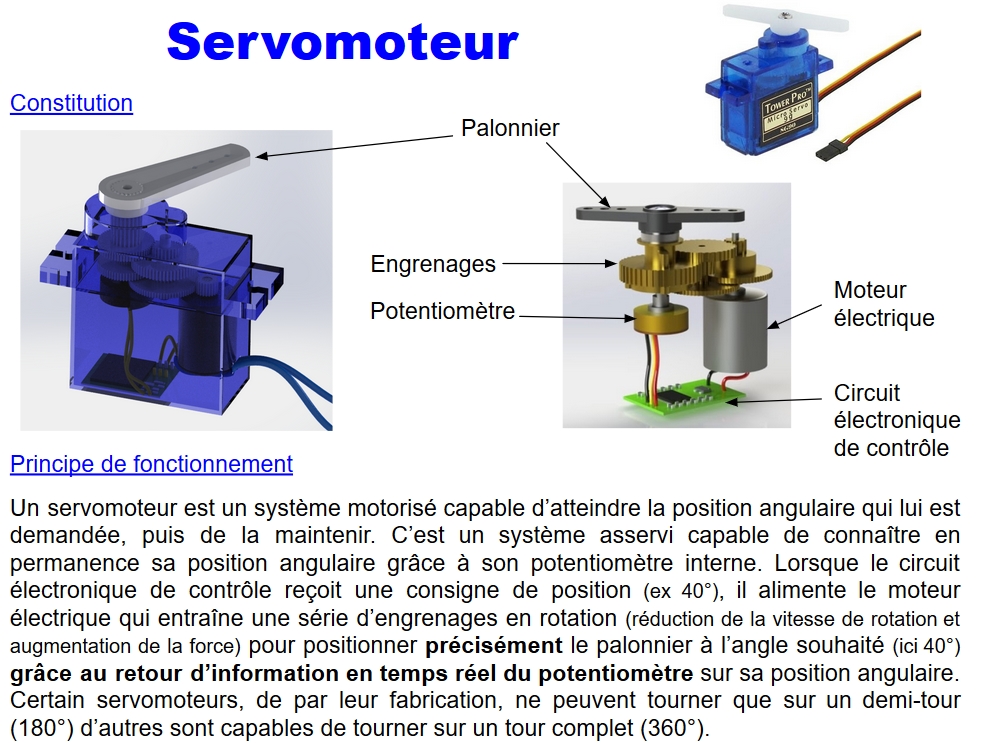
| Servomoteur SG90 : | |
 |
|